
资料包括{组态、电路图、梯形图、I/O口}
实现的功能
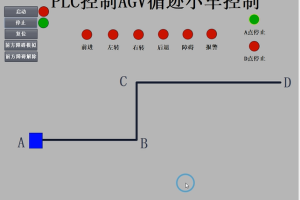
1. 路径循迹与行驶控制
- 自动循迹:小车可沿预设的 A→B→C→D 路径自动行驶,通过传感器检测路径信息,由 PLC 控制前进、左转、右转等动作。
- 方向控制:支持前进、左转、右转、后退等行驶动作,确保小车精准跟随预设轨迹。
2. 站点停靠与定位
- 定点停靠:在预设的 A 点、D 点实现精准停靠,满足物料搬运或产线对接的定位需求。
- 状态指示:通过指示灯实时显示 A 点停止、D 点停止状态,便于监控小车位置。
3. 安全保护与故障处理
- 障碍检测与报警:具备前方障碍模拟功能,检测到障碍物时触发报警并停止小车,防止碰撞。
- 紧急停止与复位:支持停止、复位操作,可在紧急情况下立即切断动力,故障排除后快速恢复运行。
- 状态反馈:前进、左转、右转、障碍、报警等状态均通过指示灯实时显示,运行状态一目了然。
4. 运行模式与操作
- 手动干预:可通过前方障碍解除等按钮模拟场景,用于调试与应急干预。
- 一键启停:配备启动、停止按钮,实现小车的全局启停控制,提升操作效率。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。另外,本站所提供的资源均只能用于学习参考,请勿直接商用或其他方式使用,若由此引起的所有纠纷,一切责任均由使用者承担。