
资料包括{组态、电路图、梯形图、I/O口}
实现的功能
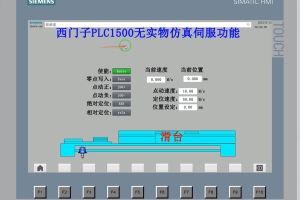
1. 伺服运动基础控制
- 使能控制:通过 “Enable” 按钮激活伺服驱动器,为运动控制提供前提条件。
- 零点写入:通过 “Zero” 按钮设置当前滑台位置为机械零点,建立坐标基准。
- 点动控制:支持 “JOG+”(正向点动)和 “JOG-”(反向点动),用于手动微调滑台位置。
2. 定位运动控制
- 绝对定位(ABS):滑台移动到 “位置设定” 参数指定的绝对坐标位置。
- 相对定位(rela):滑台从当前位置出发,移动 “位置设定” 参数指定的相对距离。
3. 运动参数配置与监测
- 参数设置:可配置点动速度、定位速度和目标位置,满足不同运动场景需求。
- 状态反馈:实时显示滑台的当前速度和当前位置,便于监控运动过程。
4. 无实物仿真验证
- 无需连接真实伺服电机与滑台,通过仿真环境即可验证 PLC1500 的伺服控制程序逻辑。
- 界面直观展示滑台的虚拟运动过程,便于调试和验证控制算法。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。另外,本站所提供的资源均只能用于学习参考,请勿直接商用或其他方式使用,若由此引起的所有纠纷,一切责任均由使用者承担。