
资料包括{组态、电路图、梯形图、I/O口}
实现的功能
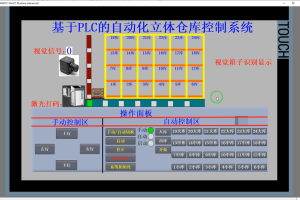
1. 运行模式与基础控制
- 手动 / 自动切换
- 自动模式:系统根据入库 / 出库指令,自动控制堆垛机定位到目标货位(1 库–24 库),完成物料存取,并联动视觉识别与激光打码。
- 手动模式:可单独控制堆垛机的上行 / 下行 / 左行 / 右行,用于设备调试和应急操作。
- 启动 / 停止 / 系统初始化 / 急停:一键启停系统,初始化功能可将堆垛机复位至原点;紧急情况下按下急停按钮可立即切断动力,保障设备安全。
2. 核心仓储流程控制
- 精准货位管理:支持对 24 个货位(1 库–24 库)的独立入库 / 出库操作,系统自动记录每个货位的物料状态。
- 视觉识别与激光打码:
- 视觉识别模块读取箱子信息,“视觉信号” 和 “视觉箱子识别显示” 实时反馈识别结果。
- 激光打码模块为物料生成唯一标识,实现全流程追溯。
- 自动出入库:在自动模式下,选择目标货位并按下 “开始”,堆垛机自动移动到对应位置完成存取动作。
3. 状态监测与可视化
- 货位状态反馈:24 个货位的入库 / 出库状态通过按钮颜色实时反馈,运行状态一目了然。
- 故障保护:系统初始化功能可在设备异常时快速复位,避免堆垛机卡滞或定位错误。
4. 应急与调试功能
- 急停保护:紧急情况下按下急停按钮,堆垛机立即停止运行,防止设备碰撞和物料损坏。
- 手动定位调试:在手动模式下,可通过方向按钮精确控制堆垛机位置,用于校准货位坐标。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。另外,本站所提供的资源均只能用于学习参考,请勿直接商用或其他方式使用,若由此引起的所有纠纷,一切责任均由使用者承担。