视频放大后不清晰,可将鼠标放在视频上,右上角出现“去bilibili观看”进行点击,转到B站观看清晰版本
实物链接:点击跳转
仿真链接:点击跳转
设计说明书链接:点击跳转
开题报告链接:点击跳转
答辩PPT链接:点击跳转
项目编号:mcuclub-dz-346
设计简介:
项目名:探测小车(实物)
项目编号:mcuclub-dz-346
单片机类型:STC89C52
具体功能:
1、通过一对红外寻迹管进行寻迹,在寻迹过程中,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警,当检测到障碍物距离小于等于30cm时,自动停车,直到障碍物移除
2、通过蓝牙控制小车前进、后退、左转、右转、停止、加速向前、减速向前,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警,当检测到障碍物距离小于等于30cm时自动避开障碍物,手机端可切换是寻迹模式还是蓝牙遥控模式
3、通过DHT11检测温湿度、通过光敏电阻检测光照值、通过MQ-5检测可燃气体,通过蓝牙将数据发送到手机端
资料预览
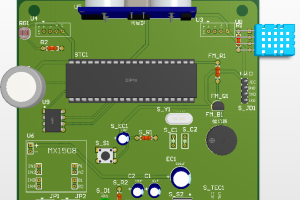
实物图:
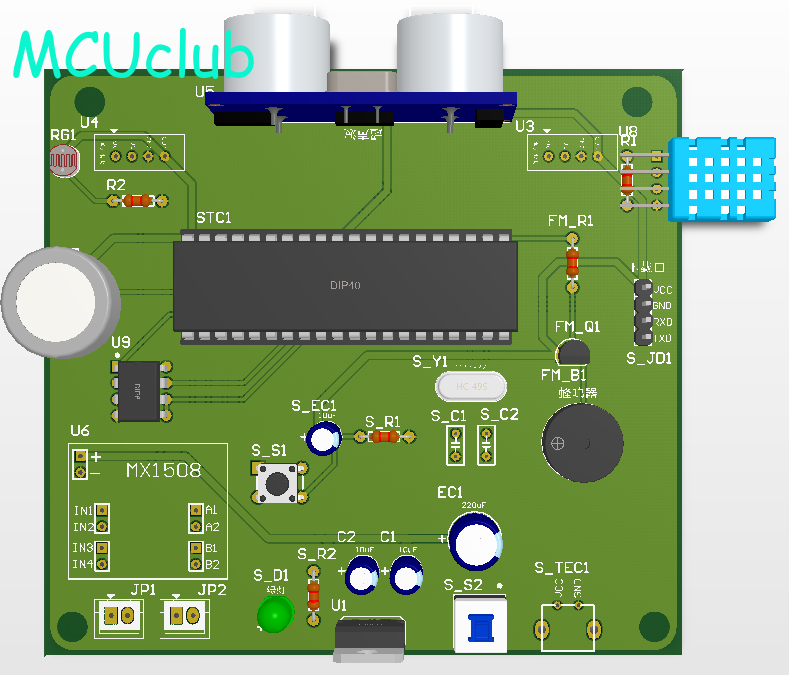
总体实物资料:
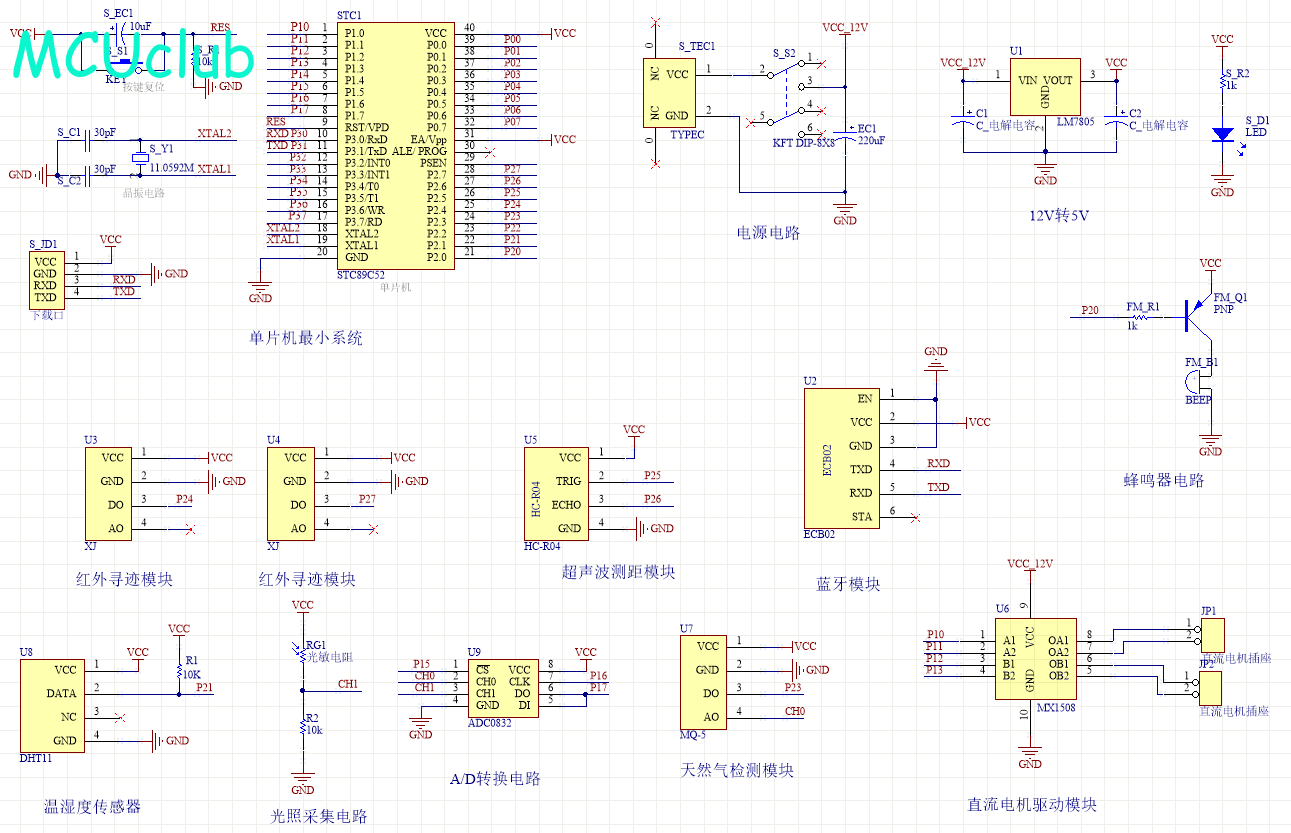
原理图:
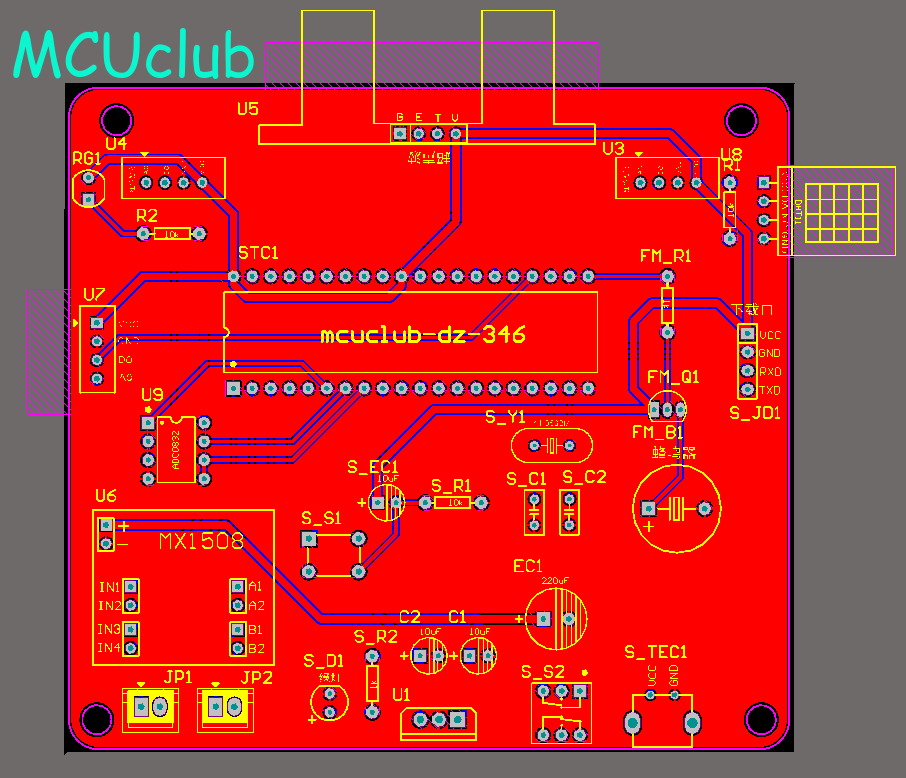
PCB:
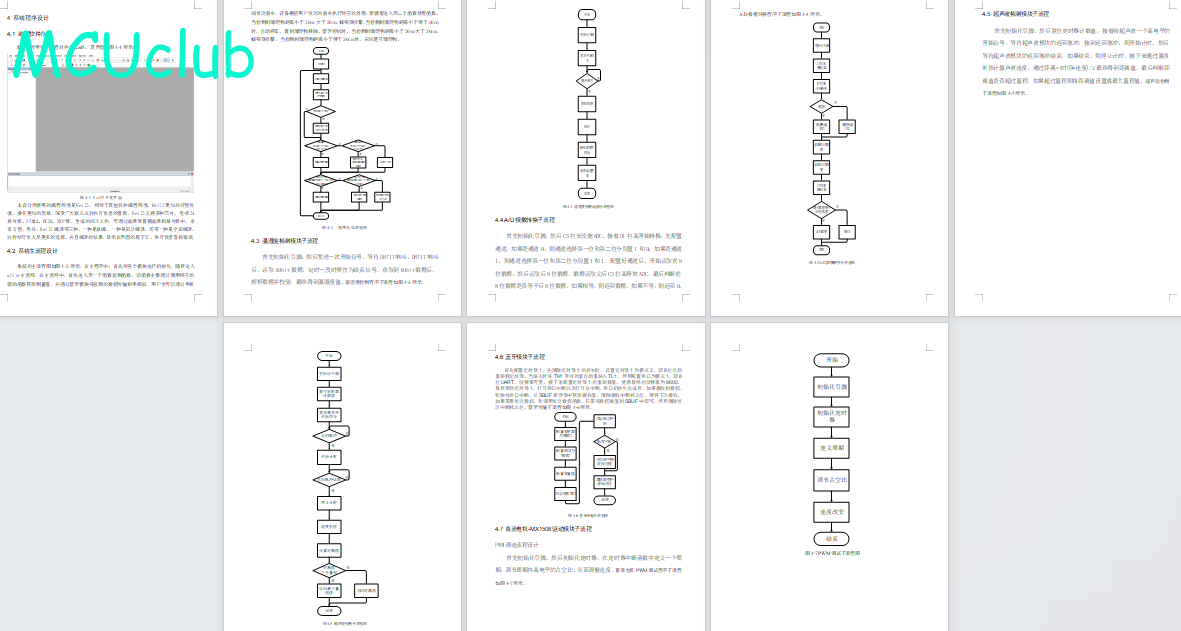
软件设计流程:
系统框图:
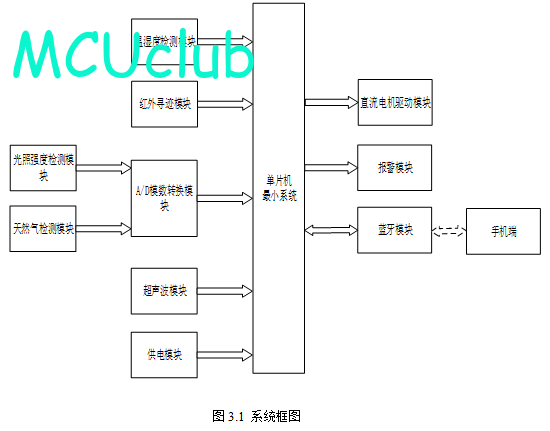
本设计以单片机为核心控制器,加上其他模块一起组成此次设计的整个系统,其中包括中控部分、输入部分和输出部分。中控部分采用了单片机控制器,其主要作用是获取输入部分的数据,经过内部处理,逻辑判断,最终控制输出部分。输入由六部分组成,第一部分是温湿度检测模块,通过该模块检测当前环境的温湿度;第二部分是红外寻迹模块,使得小车可以按照一定的路线进行行驶;第三部分是光照强度检测,通过该模块获取当前的光照强度;第四部分是天然气检测模块,通过该模块获取当前天然气浓度;第五部分是超声波检测模块,通过该模块获取小车距离障碍物的距离;第六部分是供电模块,通过该模块可给整个系统进行供电。输出由两个部分组成,第一部分是直流电机驱动模块,通过该模块控制车辆运行;第二部分是报警模块,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警,当检测到障碍物距离小于等于30cm时自动避开障碍物。除此之外,蓝牙模块既作为输入又作为输出,蓝牙模块和手机进行连接,蓝牙控制小车前进、后退、左转、右转、停止、加速向前、减速向前。具体系统框图如图3.1所示。
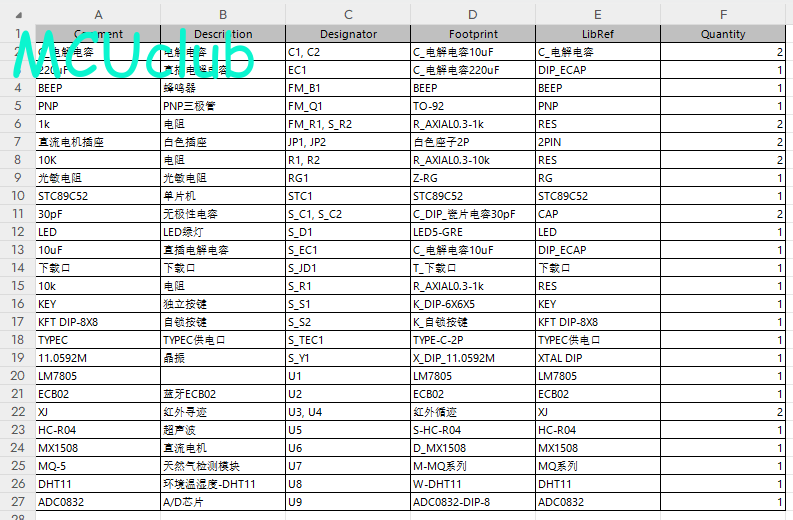
硬件清单: