
项目编号:mcuclub-cl-009
51单片机实物设计简介:
单片机类型:STC89C52
具体功能:
1、通过一对红外寻迹管进行寻迹,在寻迹过程中,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警,当检测到障碍物距离小于等于30cm时,自动停车,直到障碍物移除
2、通过蓝牙控制小车前进、后退、左转、右转、停止、加速向前、减速向前,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警,当检测到障碍物距离小于等于30cm时自动避开障碍物
3、通过红外测速管进行测速,并将速度值和路程发送到手机端上进行显示
实物演示视频:
打开视频声音方法:鼠标放在视频中,点击右下角小喇叭图形即可;视频放大后不清晰,可将鼠标放在视频上,点击“进入哔哩哔哩,观看更高清”
仿真演示视频:
打开视频声音方法:鼠标放在视频中,点击右下角小喇叭图形即可;视频放大后不清晰,可将鼠标放在视频上,点击“进入哔哩哔哩,观看更高清”
电子版资料介绍视频:
打开视频声音方法:鼠标放在视频中,点击右下角小喇叭图形即可;视频放大后不清晰,可将鼠标放在视频上,点击“进入哔哩哔哩,观看更高清”
电子版实物资料预览
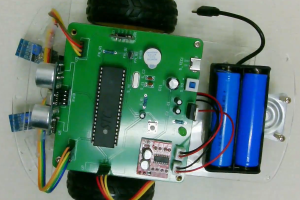
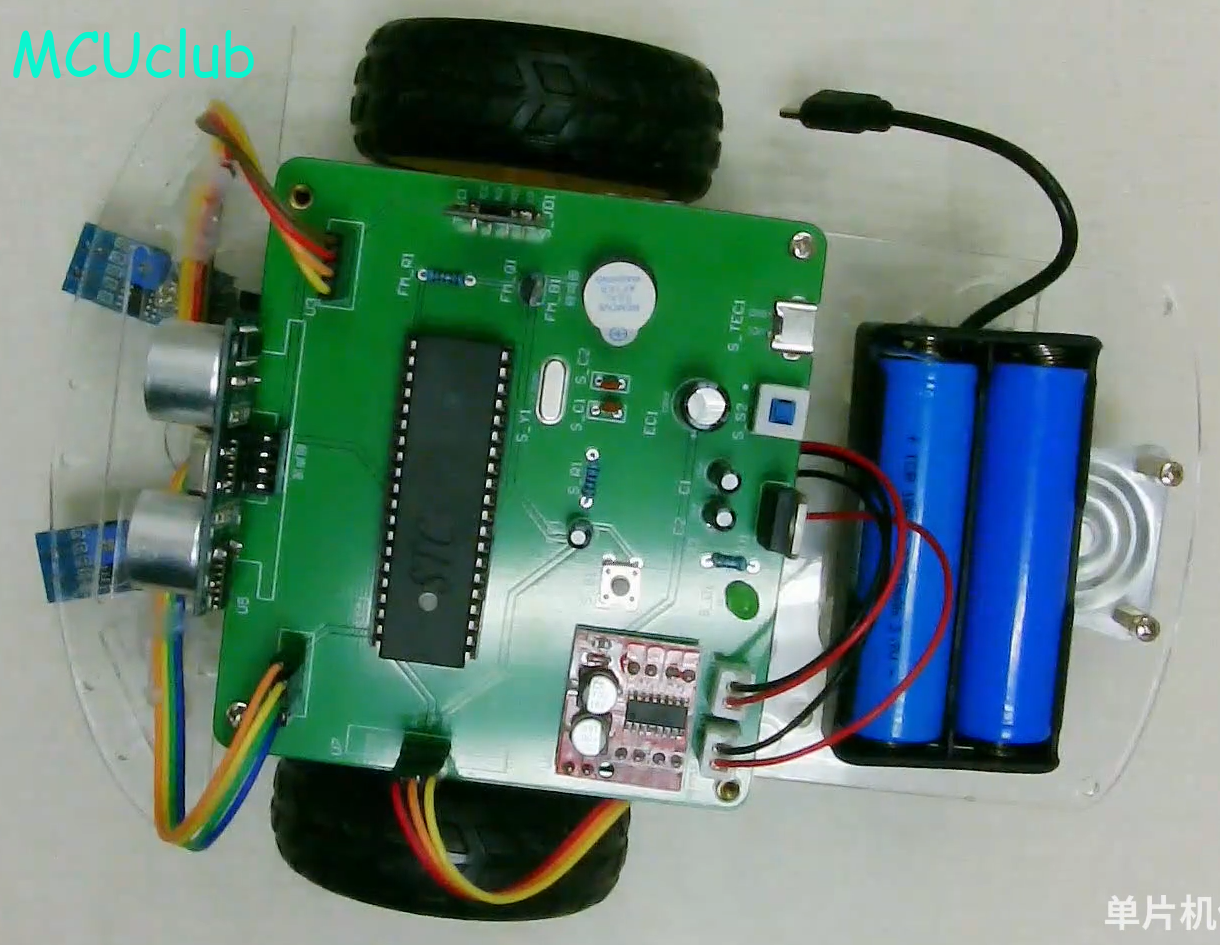
实物图
底板:底板在嘉立创进行打板,为绿色PCB板,两层板,厚度1.2,上下覆铜接地。元器件基本上为插针式,个别降压芯片会使用贴片式。
供电接口:TYPE-C
电子版仿真资料预览

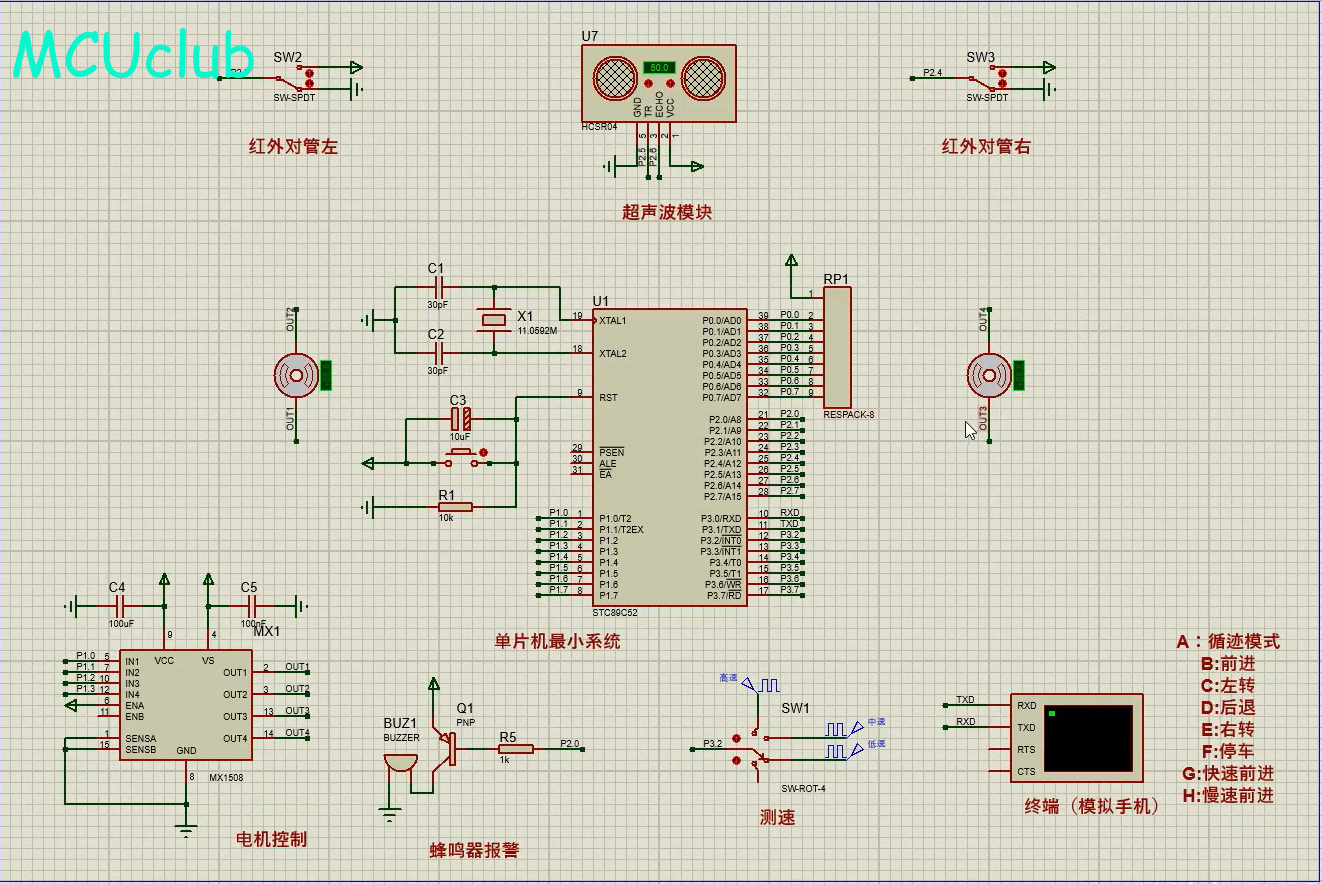
仿真图
仿真软件版本:proteus8.17 (本站提供该软件免费下载链接)
电路连线方式:网络标号连线方式
注意:部分实物元器件仿真中没有,仿真中会用其他工作原理相似的元件代替,这样可能导致实物程序和仿真程序不一样
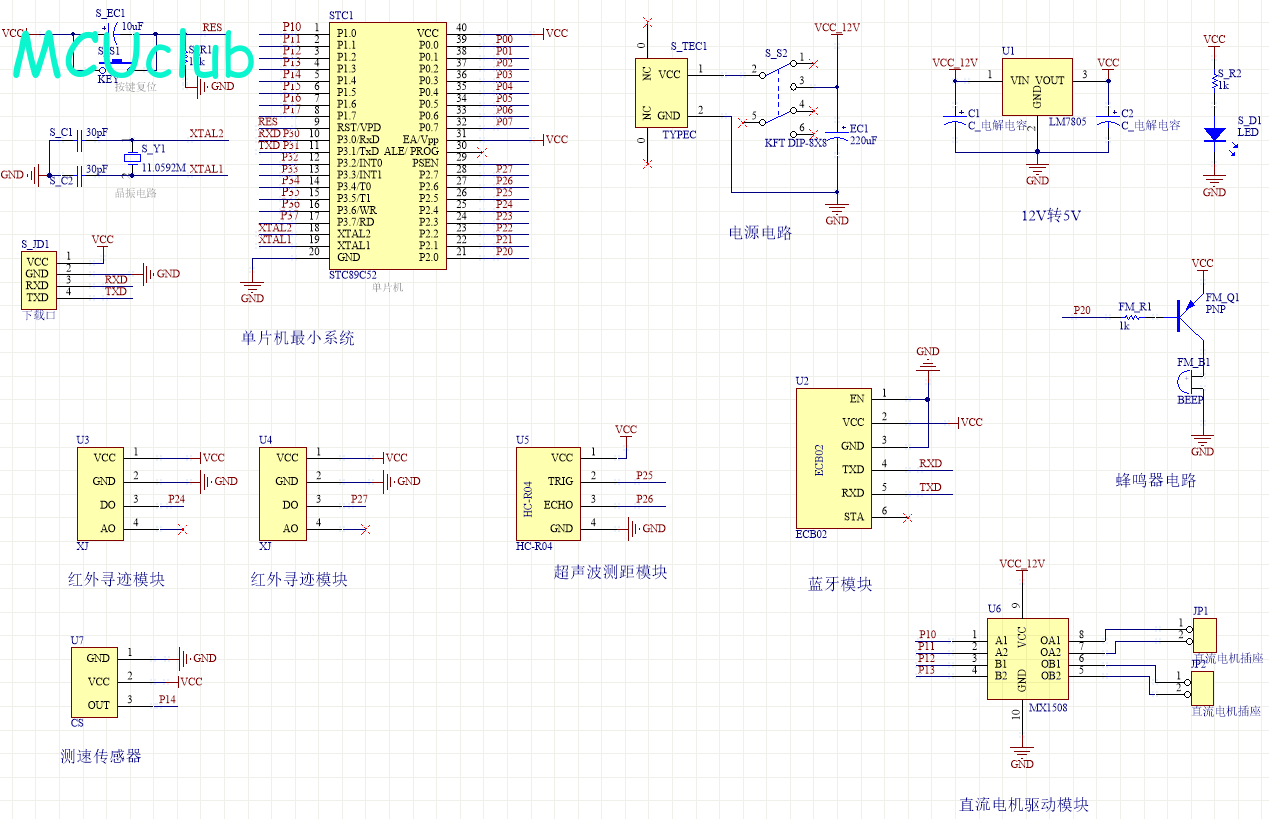
原理图
软件版本:AD2013 (本站提供该软件免费下载链接)
电路连线方式:网络标号连线方式
注意:原理图只是画出了模块的引脚图,而并不是模块的内部结构原理图
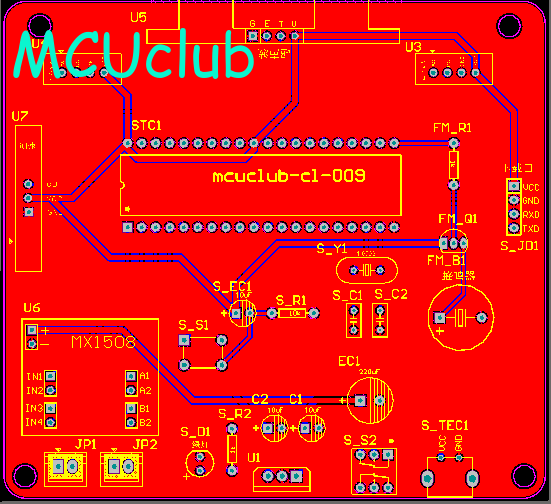
PCB图
软件版本:AD2013 (本站提供该软件免费下载链接)
PCB图是由原理图导出,封装很大一部分都是作者自己绘制,不提供封装库,只提供连接好的源文件,可以直接在嘉立创进行打板。两层板,上下覆铜接地。
注意:PCB图中间有一个项目编号,隐藏在单片机底座下,插入单片机后不会看到。如果想截没有项目编号的PCB图,可在PCB源文件中点击删除。另外,如果想在实物PCB板上加自己的信息(比如日期、学号、姓名等),可联系客服。
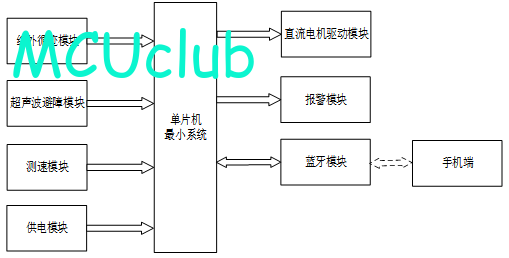
系统框图
绘制软件:VISIO (本站提供该软件免费下载链接)
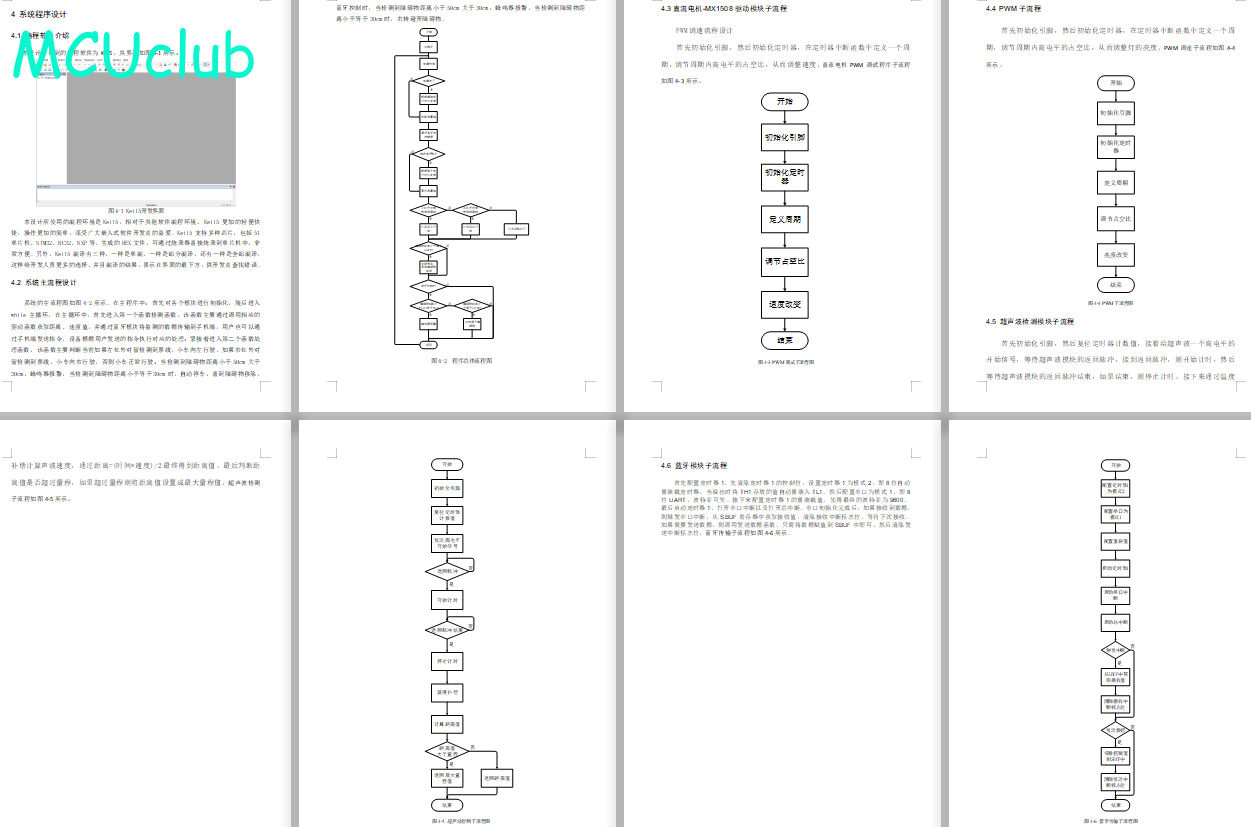
软件设计流程
绘制软件:VISIO (本站提供该软件免费下载链接)
开题报告
下图为开题报告整体框架模板,基本上所有项目的开题报告格式都如下所示,但由于部分院校要求不一致,可能有一小部分格式有所变动。
购买后可查看具体内容!
设计说明书
总字数:15000+
摘 要
随着社会的发展,人们生活水平得到很大提高。但是在人们的生活发生火灾、爆炸或者一些危险的情况时,人们近距离面对这些问题,给人们的生命及其财产带来很大的威胁。为了可以远程非接触解决这些问题,此次设计一款可以自动循迹避障小车,该避障小车通过选择单片机STC89C52单片机作为此次设计的主控芯片,通过采用MX1508作为此次设计的直流电动机,通过单片机来产生不同的PWM波形,去控制小车运行的速度,然后通过红外对管检测小车在路面行驶的轨迹及其障碍物进行检测,并将检测的数据传输到单片机进行处理,通过单片机处理输出的信号控制小车的转向及其转速,从而使得小车可以自动避开障碍物从而达到正常行驶的目的,通过红外循迹模块对当前小车车轮左右距离黑线的距离进行实时监测,并控制小车的车轮在在黑线的范围之内,用户可以根据自己的需求选择不同的路径,解决不同路径不同循迹方式及其避障的功能,所以该设计是具有研究价值和现实意义的。
关键词:小车;自动循迹;自动避障;多路径
Abstract
With the development of society, people’s life has been improved more and more. However, people often encounter many problems in their lives. When a fire, explosion or some dangerous situations occur, people go to the distance to solve these problems, which brings a great threat to people’s lives and their properties. In order to solve these problems remotely and non-contact, a car that can automatically track and avoid obstacles is designed this time. The obstacle avoidance car selects STC89C52 microcontroller as the main control chip of this design, and uses L298N as the DC motor for this design. The user communicates with the Bluetooth and the microcontroller through the mobile phone. The user generates different PWM waveforms through the microcontroller through different instructions under the mobile phone to control the speed of the car, and then uses the infrared tube to detect the track and obstacles on the road. At the same time, the detected signal is transmitted to the single-chip microcomputer for processing, and the detected signal is judged and analyzed by the single-chip microcomputer to control the speed and steering of the car, so that the car can avoid obstacles and drive normally, and realize the purpose of automatic tracking. Therefore, the design has research value and practical significance.
Key words: car; automatic tracking; automatic obstacle avoidance; bluetooth module
摘要
Abstract
1 绪论
1.1选题背景及实际意义
1.2国内外发展历程
1.3本文的组织结构
2 系统设计方案
2.1 主要模块方案旋转
2.1.1主控芯片方案选择
2.1.2 避障模块方案选择
2.1.3避障模块方案选择
2.2整体设计方案
3 硬件设计
3.1主控模块电路
3.1.1主控模块电路
3.1.2 晶振电路
3.1.3 复位电路
3.1.4 电源电路
3.2避障检测模块电路
3.3红外循迹模块电路
3.4 驱动模块电路
3.5测速模块(74HC14D)
3.6蜂鸣器报警模块
3.7蓝牙(ECB02)
4 系统程序设计
4.1 编程软件介绍
4.2 系统主流程设计
4.3直流电机-MX1508驱动模块子流程
4.4 PWM子流程
4.5 超声波检测模块子流程
4.6 蓝牙模块子流程
5 仿真测试
5.1整体仿真测试
5.2循迹仿真测试
5.3蓝牙模式仿真测试
6 实物测试
6.1实物总体设计
6.2小车不同路线循迹实物测试
6.3小车障碍物避障实物测试
7 结论
参考文献
致谢
附录
附录1:原理图
附录2:PCB
附录3:主程序
购买后可查看具体内容!
答辩PPT
下图为答辩PPT整体框架模板,基本上所有项目的答辩PPT格式都如下所示,但由于部分院校要求不一致,可能有一小部分格式有所变动。







购买后可查看具体内容!