
项目编号:mcuclub-cl-011
51单片机实物设计简介:
单片机类型:STC89C52
具体功能:
1、通过一对红外寻迹管进行寻迹,在寻迹过程中,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警,当检测到障碍物距离小于等于30cm时,自动停车,直到障碍物移除
2、通过红外遥控器控制小车前进、后退、左转、右转、停止、加速向前、减速向前,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警,当检测到障碍物距离小于等于30cm时自动避开障碍物
扩展功能:通过蓝牙控制小车前进、后退、左转、右转、停止、加速向前、减速向前,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警,当检测到障碍物距离小于等于30cm时自动避开障碍物
实物演示视频:
打开视频声音方法:鼠标放在视频中,点击右下角小喇叭图形即可;视频放大后不清晰,可将鼠标放在视频上,点击“进入哔哩哔哩,观看更高清”
仿真演示视频:
打开视频声音方法:鼠标放在视频中,点击右下角小喇叭图形即可;视频放大后不清晰,可将鼠标放在视频上,点击“进入哔哩哔哩,观看更高清”
电子版资料介绍视频:
打开视频声音方法:鼠标放在视频中,点击右下角小喇叭图形即可;视频放大后不清晰,可将鼠标放在视频上,点击“进入哔哩哔哩,观看更高清”
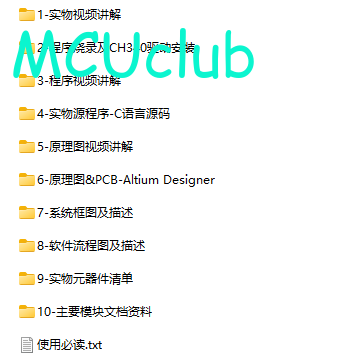
电子版实物资料预览
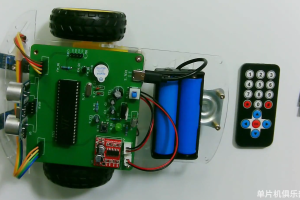
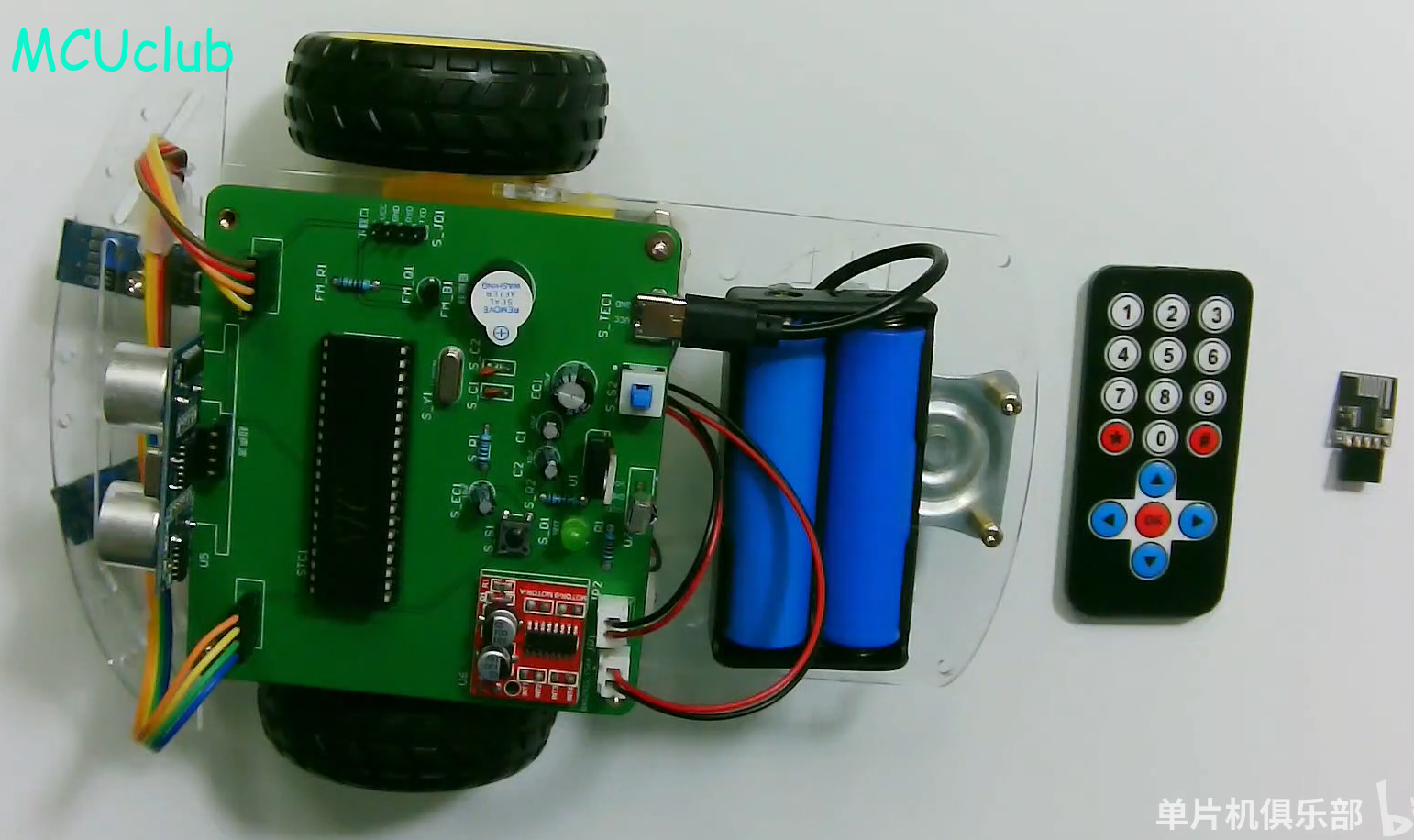
实物图
底板:底板在嘉立创进行打板,为绿色PCB板,两层板,厚度1.2,上下覆铜接地。元器件基本上为插针式,个别降压芯片会使用贴片式。
供电接口:TYPE-C
电子版仿真资料预览

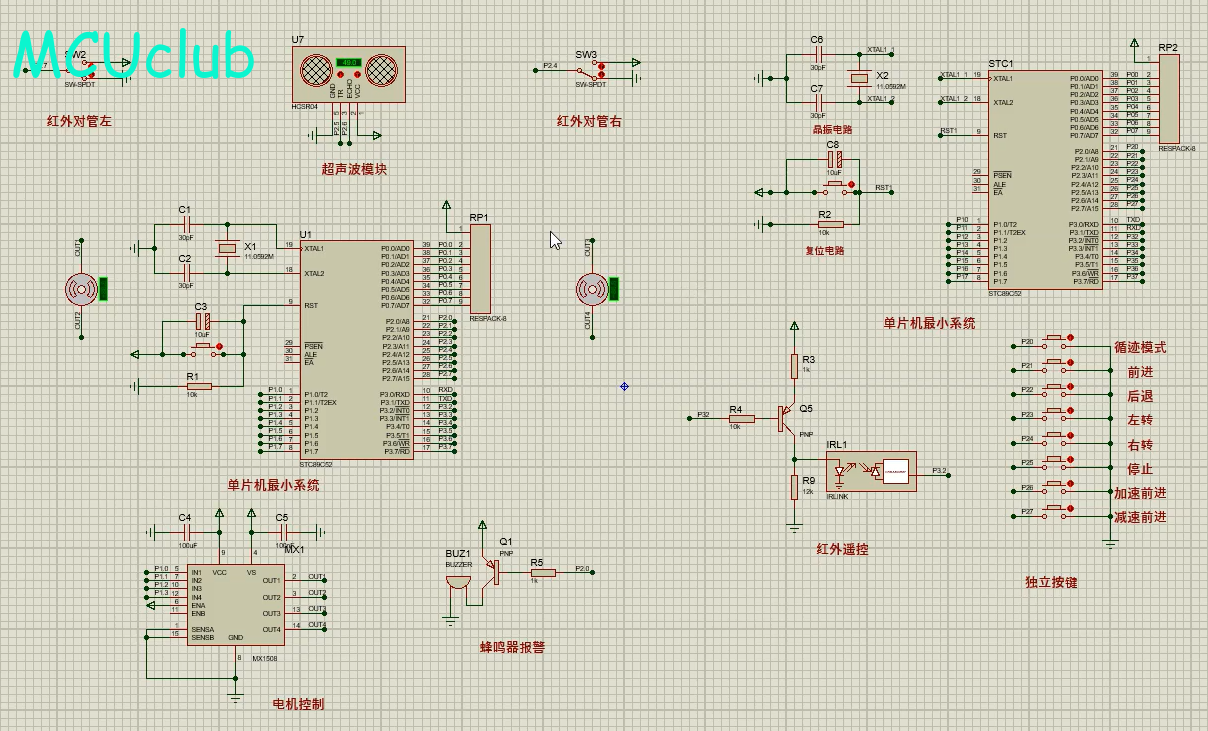
仿真图
仿真软件版本:proteus8.17 (本站提供该软件免费下载链接)
电路连线方式:网络标号连线方式
注意:部分实物元器件仿真中没有,仿真中会用其他工作原理相似的元件代替,这样可能导致实物程序和仿真程序不一样
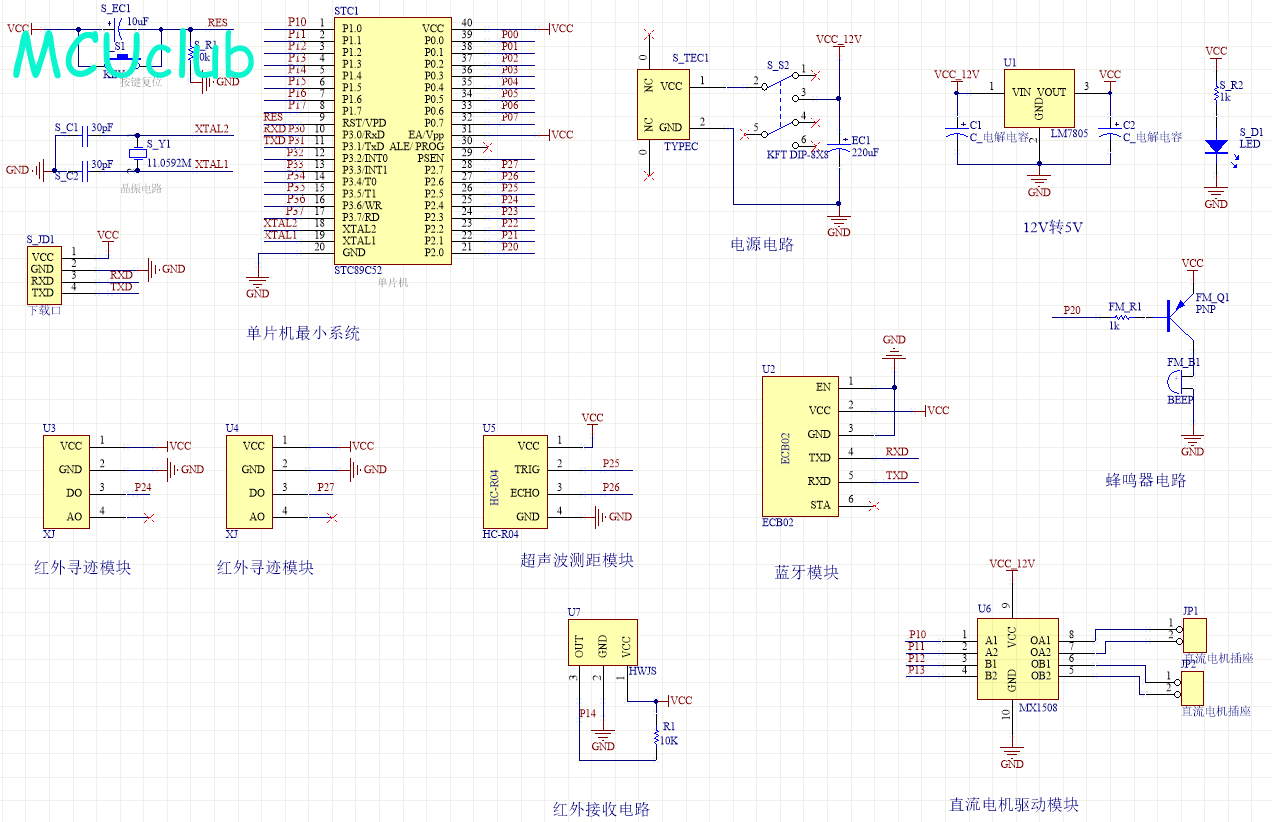
原理图
软件版本:AD2013 (本站提供该软件免费下载链接)
电路连线方式:网络标号连线方式
注意:原理图只是画出了模块的引脚图,而并不是模块的内部结构原理图
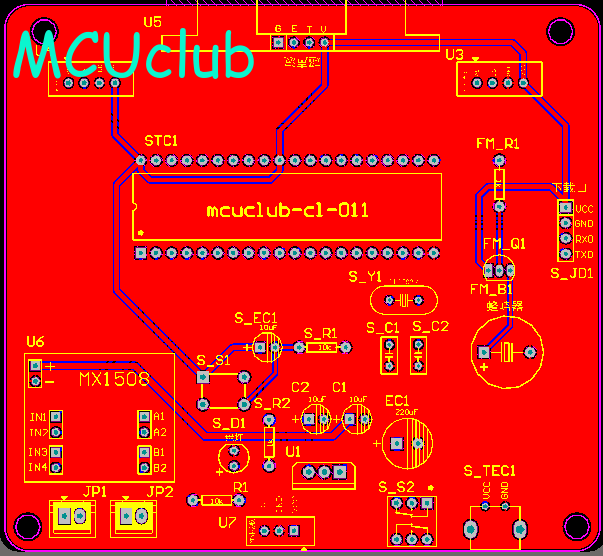
PCB图
软件版本:AD2013 (本站提供该软件免费下载链接)
PCB图是由原理图导出,封装很大一部分都是作者自己绘制,不提供封装库,只提供连接好的源文件,可以直接在嘉立创进行打板。两层板,上下覆铜接地。
注意:PCB图中间有一个项目编号,隐藏在单片机底座下,插入单片机后不会看到。如果想截没有项目编号的PCB图,可在PCB源文件中点击删除。另外,如果想在实物PCB板上加自己的信息(比如日期、学号、姓名等),可联系客服。
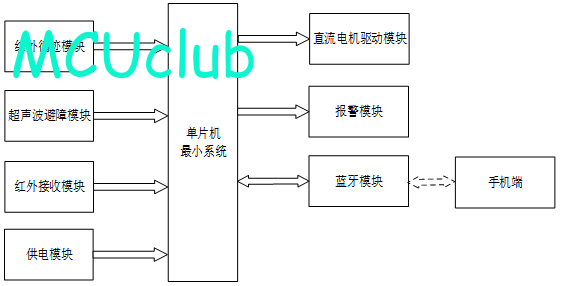
系统框图
绘制软件:VISIO (本站提供该软件免费下载链接)
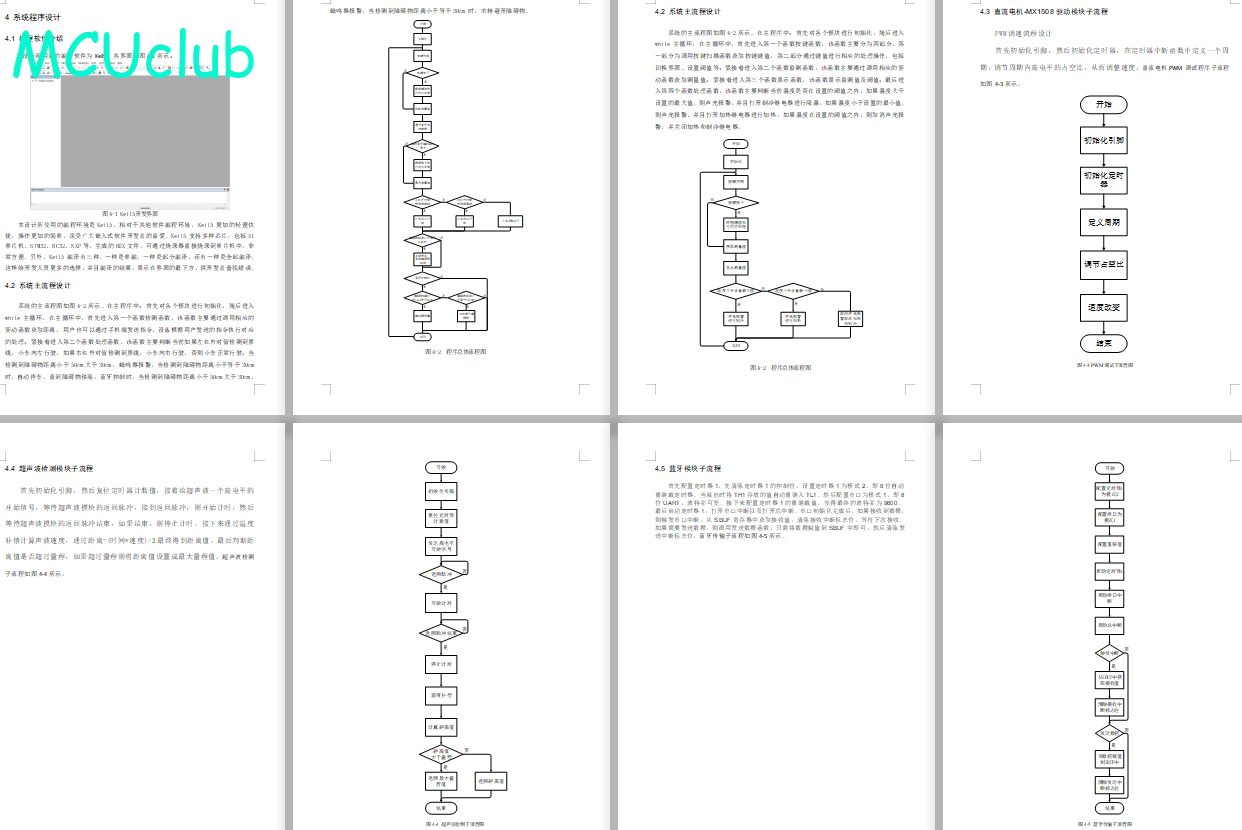
软件设计流程
绘制软件:VISIO (本站提供该软件免费下载链接)
开题报告
下图为开题报告整体框架模板,基本上所有项目的开题报告格式都如下所示,但由于部分院校要求不一致,可能有一小部分格式有所变动。
购买后可查看具体内容!
设计说明书
总字数:15000+
摘 要
随着计算机、微电子、信息技术的快速进步,智能化技术的开发速度越来越快,智能度越来越高,应用范围也得到了极大的扩展。智能作为现代的新发明,是以后的发展方向,它可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等用途。智能电动小车就是其中的一个体现。设计者可以通过软件编程实现它的行进、循迹、停止的精确控制以及检测数据的存储、显示,无需人工干预。因此,智能电动小车具有再编程的特性,是机器人的一种。本设计采用AT89C52单片机加电机驱动电路和红外遥控及循迹模块还有红外接收一体化传感器设计而成,采用模块化的设计方案,运用红外遥控器控制小车的前进、后退、左转、右转、启动和停止。
关键词:单片机;红外遥控;电机驱动
Abstract
With the rapid progress of computers, microelectronics, information technology, intelligent technology development speed faster and faster, intelligent increasing range of applications has been greatly expanded. Smart as a modern invention, is the future direction of development, it can be in an environment where automatic operation in accordance with the pre-set pattern, no human management can be applied to scientific exploration and other purposes. Smart electric car is one of expression. Designers can be programmed by software to the road, tracking, stop the precise control and test data storage and display, without human intervention. Therefore, smart electric car has a re-programming features, is a kind of robot.This design uses AT89S52 SCM and the motor drive circuit and the infrared remote control and ultrasonic module infrared receiver integrated sensor design made use of modular design, use the infrared remote control car forward, backward, turn left, turn right, start and stop.
Key words: SCM; infrared remote control; motor drive
目录
摘要
Abstract
1 绪论
1.1设计的背景和意义
1.2 智能小车的发展现状
1.3 该设计的主要内容和目的
1.4本文的组织结构
2 系统设计方案
2.1 主要模块方案旋转
2.1.1主控芯片方案选择
2.1.2 避障模块方案选择
2.2整体设计方案
3 硬件设计
3.1主控模块电路
3.1.1主控模块电路
3.1.2 晶振电路
3.1.3 复位电路
3.1.4 电源电路
3.2避障检测模块电路
3.3红外循迹模块电路
3.4 驱动模块电路
3.5红外对射管(红外遥控器)模块电路
3.6蜂鸣器报警模块
3.7蓝牙(ECB02)
4 系统程序设计
4.1 编程软件介绍
4.2 系统主流程设计
4.3直流电机-MX1508驱动模块子流程
4.4 PWM子流程
4.5 超声波检测模块子流程
4.6 蓝牙模块子流程
5 仿真测试
5.1整体仿真测试
5.2循迹仿真测试
5.3红外遥控控制仿真测试
5.4蓝牙模式仿真测试
6 实物测试
6.1实物总体设计
6.2小车不同路线循迹实物测试
6.3小车遥控避障实物测试
6.4小车蓝牙避障实物测试
7 结论
参考文献
致谢
附录
附录1:原理图
附录2:PCB
附录3:主程序
购买后可查看具体内容!
答辩PPT
下图为答辩PPT整体框架模板,基本上所有项目的答辩PPT格式都如下所示,但由于部分院校要求不一致,可能有一小部分格式有所变动。







购买后可查看具体内容!