
设计说明书
总字数:17000+
摘要
随着餐饮业的快速发展,送餐服务需求日益增加,为了提高送餐效率和用户体验,设计一款智能送餐小车显得尤为重要。
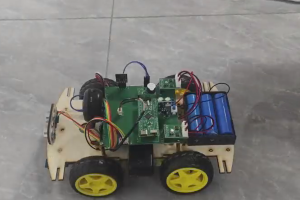
本设计采用STM32单片机作为核心控制单元,集成了多种传感器和控制模块,实现了多项智能化功能。在硬件方面,小车通过红外寻迹管实现自主导航,超声波传感器用于检测前方障碍物以避免碰撞,红外测速管则用于测量小车的行驶速度。摄像头模块用于远程监控小车的运行情况,确保送餐过程的透明和安全。在软件方面,系统采用Keil5编程,实现了对传感器数据的实时采集和处理,以及通过蓝牙模块与手机端进行通信,用户可以通过手机端控制小车的运动状态,并接收小车的速度、路程等信息。手机端还具备语音播报功能,能够提醒用户及时取餐。在技术方面,本设计综合运用了嵌入式编程、传感器数据处理、无线通信和图像处理等技术,实现了送餐小车的智能化和自主化。
实验结果表明,本设计的智能送餐小车能够显著提高送餐效率,减少人为错误,为用户提供更加便捷、高效的送餐服务。
关键词:STM32单片机; 智能送餐小车; 超声波传感器; 蓝牙;摄像头
Abstract
With the rapid development of the catering industry, the demand for food delivery service is increasing. In order to improve the efficiency and user experience of food delivery, it is particularly important to design an intelligent food delivery car. This design uses STM32 microcontroller as the core control unit, integrates a variety of sensors and control modules, and realizes a number of intelligent functions. In terms of hardware, the car realizes autonomous navigation through infrared tracking tube, ultrasonic sensor is used to detect obstacles in front to avoid collision, and infrared speedometer is used to measure the speed of the car. The camera module is used to remotely monitor the operation of the car to ensure the transparency and safety of the meal delivery process. In terms of software, the system uses keil5 programming to realize the real-time acquisition and processing of sensor data, and communicate with the mobile terminal through Bluetooth module. Users can control the motion state of the car through the mobile terminal, and receive the speed, distance and other information of the car. The mobile terminal also has voice broadcast function, which can remind users to pick up meals in time. In terms of technology, this design comprehensively uses embedded programming, sensor data processing, wireless communication and image processing technology to realize the intellectualization and autonomy of the dining car. The experimental results show that the intelligent food delivery car can significantly improve the efficiency of food delivery, reduce human errors, and provide users with more convenient and efficient food delivery services.
Key words: STM32 microcontroller; Intelligent food delivery car; Ultrasonic sensor; Bluetooth; Camera
目录
1 绪论
1.1选题背景及实际意义
1.2国内外研究现状
1.3本文的组织结构
2 系统设计方案
2.1主要模块方案旋转
2.2整体设计方案
3 硬件设计
3.1主控模块电路设计
3.2超声波传感器测距模块设计
3.3测速模块电路设计
3.4循迹模块电路设计
3.5摄像头模块电路设计
3.6直流电机驱动车轮模块设计
3.7语音播报模块设计
3.8蓝牙模块设计
3.9声光报警模块设计
4 系统程序设计
4.1 编程软件介绍
4.2主程序流程设计
4.3循迹模式函数流程设计
4.4蓝牙模式函数流程设计
4.5超声波检测模块子流程
4.6直流电机-MX1508驱动模块子流程
4.7蓝牙模块子流程
5 实物测试
5.1实物总体设计
5.2循迹防障碍物功能测试
5.3红外测速功能测试
5.4摄像头模块功能测试
5.5蓝牙模块功能测试
5.6语音播报模块功能测试
结论
参考文献
致谢
附录
附录1:原理图
附录2:PCB
附录3:主程序
购买后可查看具体内容!