
设计说明书
总字数:15000+
摘要
在农业种植和园林养护中,灌溉的精准性与自动化程度直接影响作物生长质量与资源利用效率。传统人工浇灌方式存在水资源浪费、灌溉不均等问题,而现有自动化设备多缺乏灵活避障与远程控制功能,难以适应复杂种植环境需求。因此,研发一种具备自主导航、智能避障与远程管理功能的浇灌机器人具有重要实用价值。
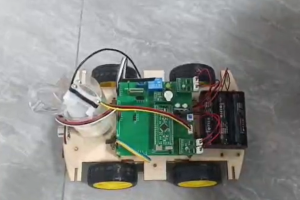
本设计提出一种基于 STM32F103C8T6 单片机的智能浇灌机器人。系统主要功能包括:通过TCRT5000 循迹模块实现预设路径自主行走;借助HC-R04 超声波模块检测前方障碍物,遇障时自动停止并触发声光报警,直至障碍移除;通过继电器控制水泵启停完成灌溉作业;利用YF-S401 水流量传感器实时监测灌溉总流量;通过4G 模块将运行状态与流量数据上传至手机端,支持远程控制机器人运行及灌溉开关操作。
该智能浇灌机器人的作用在于,为种植场景提供了自动化、精准化的灌溉解决方案。通过自主导航与避障功能减少人工干预,结合远程控制实现灵活管理,既能提高灌溉效率、节约水资源,又能降低人工成本,对推动智慧农业发展具有积极意义。
关键词:STM32;智能浇灌;循迹避障;远程控制;流量监测
Design of an Intelligent Watering Robot
Abstract
In agricultural planting and garden maintenance, the precision and automation of irrigation directly affect the quality of crop growth and resource utilization efficiency. Traditional manual irrigation methods suffer from water resource waste and uneven irrigation, while existing automated equipment often lacks flexible obstacle avoidance and remote control functions, making it difficult to adapt to complex planting environment requirements. Therefore, developing a watering robot with autonomous navigation, intelligent obstacle avoidance, and remote management functions has important practical value.
This design proposes an intelligent watering robot based on STM32F103C8T6 microcontroller. The main functions of the system include: achieving autonomous walking along preset paths through the TCRT5000 tracking module; Using the HC-R04 ultrasonic module to detect obstacles ahead, it automatically stops and triggers sound and light alarms when encountering obstacles until they are removed; Control the start and stop of the water pump through a relay to complete the irrigation operation; Real time monitoring of total irrigation flow using YF-S401 water flow sensor; Upload the operating status and traffic data to the mobile phone through the 4G module, supporting remote control of robot operation and irrigation switch operation.
The function of this intelligent irrigation robot is to provide automated and precise irrigation solutions for planting scenarios. Reducing manual intervention through autonomous navigation and obstacle avoidance functions, combined with remote control to achieve flexible management, can not only improve irrigation efficiency and save water resources, but also reduce labor costs, which has positive significance for promoting the development of smart agriculture.
Keywords:STM32; Intelligent watering; Track and avoid obstacles; Remote control; Flow monitoring
目 录
1 绪论
1.1 研究背景及意义
1.2 国内外研究现状
1.3 主要内容
2 系统总体方案设计
2.1系统总体设计
2.2 主要模块方案选择
3 系统硬件设计
3.1 总体硬件框架
3.2 主控模块电路设计
3.3 循迹模块电路设计
3.4 超声波避障模块电路设计
3.5 电机驱动模块电路设计
3.6 水泵控制模块电路设计
3.7 水流量检测模块电路设计
3.8 声光报警模块电路设计
3.9 4G 通信模块电路设计
3.10 电源模块电路设计
4 系统程序设计
4.1 编程软件介绍
4.2 系统主流程设计
4.3 直流电机速度调节子流程设计
4.4 超声波检测模块子流程设计
4.5 水流量检测子流程设计
4.6 4G模块联网子流程设计
5 实物制作与功能测试
5.1 实物制作
5.2 循迹与避障功能测试
5.3 灌溉与流量检测功能测试
5.4 远程控制与数据传输功能测试
6 总结
参考文献
致谢
附录A 原理图
附录B PCB
附录C 主程序
购买后可查看具体内容!