
设计说明书
总字数:19000+
随着现代工业的发展,危险环境的勘察与预警成为保障生产安全和人员生命健康的关键环节。尤其在复杂环境中,有害气体浓度超标、环境参数异常等问题频发,对安全生产构成严重威胁。因此,设计一套高效、智能的危险环境勘察与预警机器人控制系统显得尤为重要。
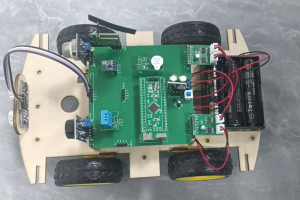
本系统以STM32F103C8T6单片机为核心,通过DHT11传感器实时监测环境温湿度,当温湿度超过预设阈值时,系统自动触发声光报警,提醒作业人员或采取相应措施;利用MQ-4传感器检测甲烷浓度,一旦甲烷浓度超标,立即发出警报,防止气体泄漏引发的安全事故;通过MQ-7传感器监测一氧化碳浓度,当其浓度超过安全范围时,启动声光报警,确保作业环境空气质量安全;采用BMP180传感器实时检测环境大气压,为环境状态评估提供重要数据支持;通过HC-SR04超声波模块监测机器人与障碍物的距离,当距离小于设定安全值时,系统自动控制小车避障,保障机器人在复杂环境中的自主安全运行;通过4G通信模块将监测数据实时传输至手机端,并支持通过手机远程控制小车运行,实现远程监控与操作。
该控制系统旨在提高危险环境勘察的准确性和预警的及时性,为管理人员提供可靠的数据支持和决策依据。并通过智能化、网络化的技术手段,实现了对复杂环境的全面监测与高效管理,为安全生产提供了有力保障。
关键词:危险环境;智能机器人;STM32;气体监测
With the development of modern industry, the investigation and early warning of hazardous environments have become a key link in ensuring production safety and the health of personnel. Especially in complex environments, problems such as excessive concentration of harmful gases and abnormal environmental parameters occur frequently, posing a serious threat to safety production. Therefore, it is particularly important to design an efficient and intelligent control system for hazardous environment survey and warning robots.
This system is based on the STM32F103C8T6 microcontroller and uses DHT11 sensors to monitor environmental temperature and humidity in real time. When the temperature and humidity exceed the preset threshold, the system automatically triggers an audible and visual alarm to remind operators or take corresponding measures; Using MQ-4 sensors to detect methane concentration, once the methane concentration exceeds the standard, an alarm will be immediately issued to prevent safety accidents caused by gas leakage; Monitor the concentration of carbon monoxide through the MQ-7 sensor, and when its concentration exceeds the safe range, activate the sound and light alarm to ensure the air quality and safety of the working environment; Real time detection of ambient atmospheric pressure using BMP180 sensor, providing important data support for environmental status assessment; By monitoring the distance between the robot and obstacles through the HC-SR04 ultrasonic module, when the distance is less than the set safety value, the system automatically controls the car to avoid obstacles, ensuring the autonomous and safe operation of the robot in complex environments; Real time monitoring data is transmitted to the mobile phone through the 4G communication module, and remote control of the car operation is supported through the mobile phone to achieve remote monitoring and operation.
The control system aims to improve the accuracy of hazardous environment investigation and the timeliness of early warning, providing reliable data support and decision-making basis for management personnel. And through intelligent and networked technological means, comprehensive monitoring and efficient management of complex environments have been achieved, providing strong guarantees for safety production.
Key words:Hazardous environment; Intelligent robots; STM32; Gas monitoring
目 录
摘 要
Abstract
第1章 绪论
1.1 课题的背景
1.2 课题意义
1.3 国内外课题现状
1.3.1 国内现状
1.3.2 国外现状
1.4 课题主要设计内容
1.5 本章小结
第2章 系统总体方案设计
2.1 总体方案设计规划和框图
2.2 系统硬件结构
2.3 控制系统设计
2.3.1 数据采集模块
2.3.2 控制系统模块
2.3.3 通信传输模块
2.4 本章小结
第3章 系统硬件电路设计
3.1 方案选择
3.1.1 单片机的选择
3.1.2 温湿度传感器的选择
3.1.3 甲烷浓度传感器的选择
3.1.4 CO 浓度传感器的选择
3.1.5 大气压传感器的选择
3.1.6 障碍物距离传感器的选择
3.2 传感器模块
3.2.1 温湿度检测电路
3.2.2 甲烷检测电路
3.2.3 CO检测电路
3.2.4 大气压检测电路
3.2.5 障碍物距离检测电路
3.2.6 直流电机驱动模块电路
3.3 单片机最小系统
3.4 声光报警电路
3.5 4G电路
3.6 电气原理图
第4章 系统软件设计
4.1 系统主程序设计
4.2 按键模块程序设计
4.3 温湿度检测模块程序设计
4.4 甲烷浓度模块程序设计
4.5 CO浓度模块程序设计
4.6 大气压监测模块程序设计
4.7 障碍物距离模块程序设计
4.8本章小结
第5章 实物与调试
5.1 Altium Designer简介
5.2 设计过程中的问题
5.3 实物功能调试
第6章 总结与展望
参考文献
致 谢
附录一 中文译文
附录二 外文原文
附录三 源代码
购买后可查看具体内容!