
设计说明书
总字数:14000+
随着智能家居理念的深度普及和现代生活节奏的加快,具备智能感知与自主作业能力的清洁设备成为提升家居生活品质的核心需求之一。传统人工清扫不仅耗时费力,更难以实现地面垃圾的精准定位与高效清理;市面上普通扫地机器人多存在避障视角局限、仅能检测单一方向障碍的问题,易发生碰撞且清洁覆盖率低,无法满足用户精细化清洁需求。因此,研发一种能精准识别垃圾、全方位探测障碍并支持远程控制的扫地机器人十分必要。
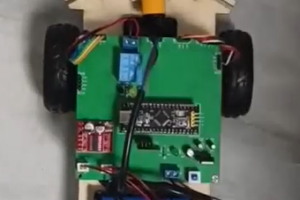
本设计提出了一种基于 STM32F103C8T6 单片机的扫地机器人。系统主要功能包括:通过两个 TCRT5000 红外寻迹管实时检测路面垃圾,若检测到垃圾则自动触发继电器带动风扇启动模拟清扫动作;借助 SG90 舵机旋转带动 E18-D80NK 光电检测模块,实现对前方、左侧、右侧三个方向障碍物的全方位探测,并通过预设逻辑自动完成避障绕行;通过蓝牙模块建立与手机端的无线通信,支持用户远程操控机器人的前进、后退、转向等行驶状态。
该扫地机器人的作用在于,为用户提供了一种更智能、更高效的家庭清洁解决方案。通过垃圾精准识别、多方向避障与手机远程控制的协同运作,大幅提升了清洁覆盖率与作业安全性,减少人工干预成本,为用户节省时间与精力,进一步优化家居清洁体验。
关键词:STM32;扫地机器人;红外寻迹;全方位避障;蓝牙控制
Abstract
With the in-depth popularization of smart home concepts and the acceleration of modern life rhythm, cleaning equipment with intelligent perception and autonomous operation capabilities has become one of the core demands for improving the quality of home life. Traditional manual cleaning is not only time-consuming and laborious, but also difficult to achieve accurate positioning and efficient cleaning of ground garbage; most ordinary sweeping robots on the market have the problem of limited obstacle avoidance perspective and only being able to detect obstacles in a single direction, which are prone to collisions and have low cleaning coverage, failing to meet users’ refined cleaning needs. Therefore, it is very necessary to develop a sweeping robot that can accurately identify garbage, detect obstacles in all directions and support remote control.
This design proposes a sweeping robot based on the STM32F103C8T6 single-chip microcomputer. The main functions of the system include: real-time detection of ground garbage through two TCRT5000 infrared tracking tubes, and automatic triggering of a relay to drive a fan to start simulating cleaning actions when garbage is detected; using an SG90 servo motor to rotate and drive the E18-D80NK photoelectric detection module to realize all-round detection of obstacles in the front, left and right directions, and automatically complete obstacle avoidance and detour through preset logic; establishing wireless communication with the mobile phone terminal through the Bluetooth module to support users in remotely controlling the driving states of the robot such as forward, backward and steering.
The function of this sweeping robot is to provide users with a more intelligent and efficient household cleaning solution. Through the coordinated operation of accurate garbage identification, multi-directional obstacle avoidance and remote mobile phone control, it greatly improves cleaning coverage and operation safety, reduces manual intervention costs, saves users time and energy, and further optimizes the home cleaning experience.
Keywords:STM32; Sweeping robot; Infrared tracking; Omnidirectional obstacle avoidance; Bluetooth control
目 录
1 绪论
1.1 研究背景及意义
1.2 国内外研究现状
1.3 主要内容
2 系统总体方案设计
2.1 系统总体设计
2.2 主要模块方案选择
3 系统硬件设计
3.1 总体硬件框架
3.2 主控模块电路设计
3.3 感知模块电路设计
3.4 执行模块电路设计
3.5 通信模块电路设计
3.6 电源模块电路设计
4 系统程序设计
4.1 编程软件介绍
4.2 系统主流程设计
4.3 红外循迹模块子流程设计
4.4 光电检测模块子流程设计
4.5 舵机子流程设计
4.6 直流电机速度调节子流程设计
4.7 蓝牙模块子流程设计
5 实物制作与功能测试
5.1 实物制作
5.2 垃圾检测与清扫功能测试
5.3 多方向避障功能测试
5.4 蓝牙远程控制功能测试
5.5 综合运行功能测试
6 总结
参考文献
致谢
附录A 原理图
附录B PCB
附录C 主程序
购买后可查看具体内容!