
设计说明书
总字数:11000+
摘要
随着人们生活节奏的加快和对家居环境清洁需求的提升,扫地机器人作为减轻家务负担的智能设备,其智能化和实用性备受关注。然而,传统扫地机器人在避障精准度和角落清扫完整性方面存在不足,容易碰撞家居或遗漏墙角等卫生死角,难以满足用户对高效清洁的要求。
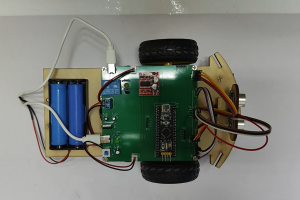
基于 STM32F103C8T6 单片机的智能避障扫地机器人,整合了舵机、超声波传感器、红外寻迹模块及继电器等硬件,实现了多项核心功能:通过舵机带动超声波传感器转动,实时检测周围家居等障碍物,当检测到距离过近时,及时调整行进方向以避免碰撞;借助红外寻迹模块识别墙角预设的黑白线,精准定位角落区域并进行重点清扫;开机后,继电器自动触发清扫装置启动,自主完成地面清扫作业。
该机器人的实现,有效提升了家居清扫的智能化水平,其精准的避障功能减少了对家居的碰撞损伤,角落清扫功能确保了卫生无死角,为用户提供了更高效、便捷的清洁体验,同时也为扫地机器人的功能优化和性能提升提供了有益的参考,具有一定的实际应用价值和技术借鉴意义。
关键词:STM32F103C8T6;扫地机器人;超声波避障;红外寻迹;自动清扫
ABSTRACT
With the acceleration of people’s life rhythm and the improvement of demand for home environment cleaning, sweeping robots, as intelligent devices to reduce housework burden, have attracted much attention for their intelligence and practicability. However, traditional sweeping robots have deficiencies in obstacle avoidance accuracy and corner cleaning integrity, easily colliding with home furnishings or missing dead corners such as wall corners, which makes it difficult to meet users’ requirements for efficient cleaning.
The intelligent obstacle-avoiding sweeping robot based on STM32F103C8T6 single-chip microcomputer integrates hardware such as steering gear, ultrasonic sensor, infrared tracking module and relay, and realizes several core functions: the steering gear drives the ultrasonic sensor to rotate to detect surrounding obstacles such as home furnishings in real time, and when it detects that the distance is too close, it timely adjusts the traveling direction to avoid collision; it uses the infrared tracking module to identify the black and white lines preset at the wall corners, accurately locates the corner areas and conducts key cleaning; after starting up, the relay automatically triggers the cleaning device to start, and independently completes the ground cleaning work.
The realization of this robot effectively improves the intelligence level of home cleaning. Its accurate obstacle avoidance function reduces collision damage to home furnishings, and the corner cleaning function ensures no dead corners, providing users with a more efficient and convenient cleaning experience. At the same time, it also provides a useful reference for the function optimization and performance improvement of sweeping robots, and has certain practical application value and technical reference significance.
Keywords:STM32F103C8T6; Sweeping robot; Ultrasonic obstacle avoidance; Infrared tracking; Automatic cleaning
目录
第1章 绪论
1.1 研究的目的及意义
1.2 国内外发展情况
1.3 本文主要研究内容
第2章 设计思路与方案论证
2.1 主要元器件选择
2.1.1 主控芯片选择
2.1.2 避障模块选择
2.1.3 红外寻迹模块选择
2.1.4 清扫控制模块选择
2.2整体设计方案
第3章 硬件设计
3.1 主控电路模块
3.2 避障模块电路
3.3 红外寻迹模块电路
3.4 清扫控制模块电路
第4章 系统程序设计
4.1 编程软件介绍
4.2 系统主流程设计
4.3 直流电机-MX1508驱动模块子流程
4.4 超声波检测模块子流程
4.5 舵机模块子流通
第 5 章 实物测试
5.1 整体实物测试
5.2 避障功能测试
5.3 红外寻迹与角落清扫功能测试
5.4 清扫控制功能测试
第6章 总结与展望
6.1 总结
6.2 展望
致谢
参考文献
附录
附录一:原理图
附录二:PCB
附录三:主程序
购买后可查看具体内容!