
设计说明书
总字数:13000+
摘 要
随着智能驾驶技术的发展和对行车安全要求的提高,倒车辅助系统成为提升驾驶安全性的重要组成部分。基于单片机的智能倒车系统能有效解决倒车过程中视野受限、操作不便等问题,为驾驶员提供可靠的安全保障。本设计开发了一种基于 STM32F103C8T6 单片机的智能倒车系统,可实现对倒车状态的智能化监测与控制,提高倒车安全性和操作便捷性。
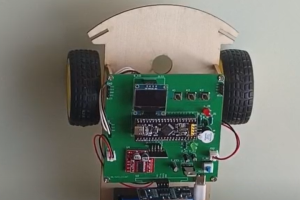
该智能倒车系统能够通过红外测速管实时检测当前车速,并通过超声波模块检测倒车时与后方墙体的距离,相关数据实时显示在 OLED 屏幕上,为驾驶员提供直观的倒车信息。系统根据距离值进行分级报警:当距离大于最大值和最小值之间的一半时,启动缓慢声光报警;当距离小于该一半值时,触发急促声光报警;当距离小于最小值时,自动控制小车停车,避免碰撞事故。同时,系统支持通过蓝牙远程控制小车运行,实现了智能化的倒车操作管理。
关键词:智能倒车系统,车速检测,距离监测,声光报警,32 单片机
Abstract
With the development of intelligent driving technology and the increasing requirements for driving safety, reverse assist systems have become an important part of improving driving safety. The intelligent reverse system based on a single-chip microcomputer can effectively solve problems such as limited vision and inconvenient operation during reversing, providing reliable safety guarantees for drivers. This design develops an intelligent reverse system based on the STM32F103C8T6 single-chip microcomputer, which can realize intelligent monitoring and control of the reversing state, improving the safety and operational convenience of reversing.
The intelligent reverse system can detect the current vehicle speed in real-time through an infrared speed measuring tube and detect the distance from the rear wall during reversing through an ultrasonic module. Relevant data is displayed on the OLED screen in real-time, providing drivers with intuitive reversing information. The system implements hierarchical alarms based on distance values: when the distance is greater than half of the range between the maximum and minimum values, a slow sound and light alarm is activated; when the distance is less than this half value, a rapid sound and light alarm is triggered; when the distance is less than the minimum value, it automatically controls the car to stop to avoid collision accidents. At the same time, the system supports remote control of the car’s operation through Bluetooth, realizing intelligent management of reversing operations.
Keywords:Intelligent reverse system; Vehicle speed detection; Distance monitoring; Sound and light alarm; 32-bit single-chip microcomputer
目 录
1 绪论
1.1 课题背景及意义
1.2 国内外发展现状
1.2.1国内研究现状
1.2.2国外研究现状
1.3 主要研究内容
2 设计方案
2.1 系统方案设计
2.2 主控模块选择
2.3 测速模块选择
2.4 测距模块选择
2.5 报警模块选择
2.6 通信模块选择
2.7 显示模块选择
2.8 系统设计要求
第 3 章 系统硬件设计
3.1 主控电路设计
3.2 测速电路设计
3.3 测距电路设计
3.4 报警电路设计
3.5 蓝牙通信电路设计
3.6 显示电路设计
3.7 电机驱动电路设计
第4章 系统程序设计
4.1 编程软件介绍
4.2 系统主流程设计
4.3 独立按键
4.4 超声波检测模块子流程
4.5 OLED显示流程设计
4.6 直流电机-MX1508驱动模块子流程
4.7 蓝牙模块子流程
第 5 章 实物制作与调试
5.1 实物制作
5.2 实物测试
5.3 测试结果
总结和展望
参考文献
致谢
附录
附录A-电路图
附录B-PCB
附录C-程序控制
购买后可查看具体内容!