
资料包括{组态、电路图、梯形图、I/O口}
实现的功能
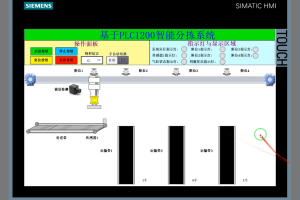
1. 运行模式与基础控制
- 自动 / 手动切换
- 自动模式:系统按预设流程自动完成物料检测、识别、分拣的全流程。
- 手动模式:可单独控制各执行部件,用于设备调试和应急操作。
- 启动 / 停止 / 急停 / 复位:一键启停系统,紧急情况下按下急停按钮可立即切断动力,故障后可快速复位恢复运行。
- 物料给定选择:支持选择不同物料类型,系统自动调用对应分拣逻辑。
2. 核心分拣流程控制
- 视觉检测与识别:通过视觉检测模块识别物料类型与特征,为分拣提供判断依据。
- 精准定位与分拣:伺服驱动的分拣机构配合 4 个限位传感器(限位 1–4),实现物料的精准定位与抓取,将其分拣至对应的运输带(运输带 1–3)。
- 传送带联动:物料通过传送带输送至分拣区域,传感器 1 检测到物料到位后,触发视觉检测与分拣动作。
3. 状态监测与计数
- 实时计数统计:每个运输带下方显示当前分拣数量(如运输带 1 为 1 个,运输带 3 为 1 个),便于生产效率统计。
- 状态可视化:系统运行、传感器、气缸、伺服、限位等状态通过指示灯实时反馈,故障时可快速定位问题。
4. 应急与调试功能
- 急停保护:紧急情况下按下急停按钮,所有动作立即停止,保障人员与设备安全。
- 复位功能:故障排除后,按下复位按钮可快速恢复系统运行。
手动调试:在手动模式下可单独控制各执行部件,用于调试分拣精度和设备维护。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。另外,本站所提供的资源均只能用于学习参考,请勿直接商用或其他方式使用,若由此引起的所有纠纷,一切责任均由使用者承担。