
一、实物图(型号:无)
二、原理图
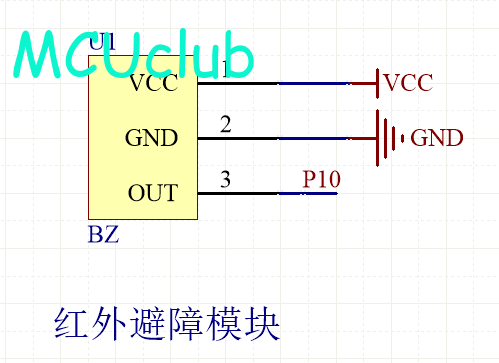
| 编号 | 名称 | 功能 |
| 1 | VCC | 电源正 |
| 2 | GND | 电源地 |
| 3 | OUT | 数字量输出引脚 |
传感器的OUT引脚用来指示反射光强度是否高于或低于某个阈值,通过电位器调节控制相应阈值,反射光强度低于阈值时DO输出高电平,反之DO输出低电平。
三、传感器原理

红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和导通状态。
注意这里是传感器的原理,不是模块的原理,下面是红外循迹传感器模块的原理。
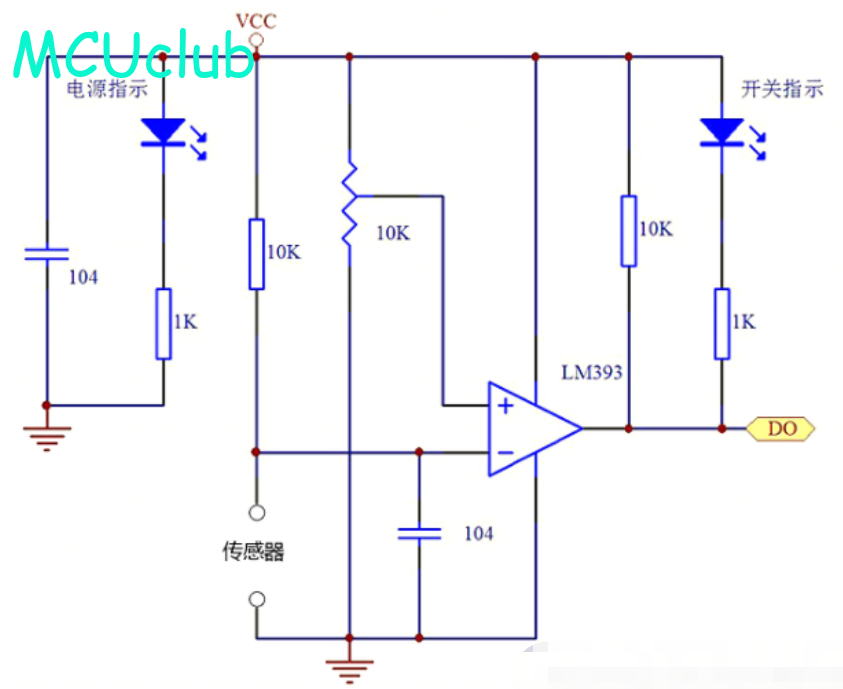
这里采用的是一个LM393电压比较器,(LM393在没有负反馈的时候)当正输入端电压大于负输入端的时候,输出高电平,即VCC,当负输入端的电压大于正输入端的电压的时候输出为低电平,即0V,所以LM393输出为0或1的数字信号。因为传感器是常开的,所以在当发射出的红外线没有被反射回来或被反射回来但强度不够大时,传感器断开,LM393正向输入端电压大于反相输入端,此时输出为高电平;当被检测物体出现在检测范围内,红外线被反射回来且强度足够大时,传感器导通,反相输入端电压大于正向输入端,此时输出为低电平。
四、传感器特点
体积小、灵敏度高、响应速度快
五、典型应用
避障小车、智能垃圾桶、机器人避障
六、使用操作
供电正常时,模块前方没有障碍物,只有PWR-LED点亮,DO引脚输出高电平;障碍物放在模块前5cm处,DO-LED点亮,DO引脚输出低电平。
注意:传感器上有一个灵敏度调节电位器,可以使用十字起调节灵敏度。如果上电后,模块前方5cm处有障碍物,DO-LED熄灭,只亮PWR-LED灯,说明已达到最低的灵敏度,需要旋转调节,使得DO-LED亮;当模块前方5cm处没有障碍物,DO-LED点亮,说明已达到最高的灵敏度,需要旋转调节,使得DO-LED熄灭。
该模块的有效距离在2-30cm,一般调节到5cm左右。检测角度35°。
由于黑色具有较强的吸收能力,所以不能用黑色作为障碍物。