
设计说明书
总字数:16000+
摘要
在智能移动设备研发与实践应用领域,具备自主循迹与避障能力的小车系统具有重要的研究价值与应用前景,可广泛应用于自动化运输、教学实验、环境探测等场景。传统的小车控制多依赖人工远程操控或简单的预设程序,不仅灵活性差、应对复杂环境的能力弱,还存在响应不及时、操作繁琐等问题,难以满足智能化、自主化的应用需求。
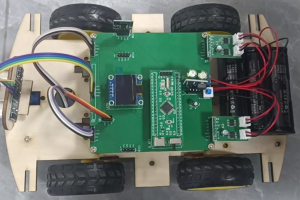
基于 STM32F103C8T6 单片机的智能循迹避障小车系统,整合了 2 个 TCRT5000 循迹模块、超声波模块、SG90 舵机、OLED 显示屏、ECB02 蓝牙模块及小车驱动执行组件,实现了小车的自主循迹、智能避障及多样化控制。系统核心功能包括:通过 2 个 TCRT5000 循迹模块,精准识别路线并控制小车按设定路线行走;在循迹模式下,借助超声波模块实时检测前方障碍物,一旦检测到障碍物便立即停止运行,直至障碍物离开后再恢复运行;在避障模式下,当检测到前方有障碍物时,SG90 舵机带动超声波模块左转,若左边无障碍物则小车左转,若检测到左边有障碍物则舵机带动超声波模块右转,若右边无障碍物则小车右转,若检测到右边也有障碍物则小车后退;通过 OLED 显示屏实时显示检测到的距离等参数;利用 ECB02 模块将检测数据传输至手机端,同时支持通过手机控制小车的运行方向(前进、后退、左转、右转)及模式切换。
该系统的实现,有效提升了小车运行的自主性与智能化水平,增强了其对复杂环境的适应能力,为相关智能移动设备的研发与教学实践提供了直观且可靠的参考方案,具有较高的实用价值与推广意义。
关键词:STM32F103C8T6;智能小车;循迹避障;传感器;蓝牙通信;自主控制
ABSTRACT
In the field of research and practical application of intelligent mobile devices, a trolley system with autonomous tracking and obstacle-avoiding capabilities has important research value and application prospects, and can be widely used in scenarios such as automated transportation, teaching experiments, and environmental detection. Traditional trolley control mostly relies on manual remote control or simple preset programs, which not only have poor flexibility and weak ability to deal with complex environments, but also have problems such as delayed response and cumbersome operation, making it difficult to meet the intelligent and autonomous application needs.
The intelligent tracking and obstacle-avoiding trolley system based on the STM32F103C8T6 microcontroller integrates 2 TCRT5000 tracking modules, an ultrasonic module, an SG90 servo, an OLED display, an ECB02 Bluetooth module, and trolley drive execution components, realizing autonomous tracking, intelligent obstacle avoidance, and diversified control of the trolley. The core functions of the system include: accurately identifying the route through 2 TCRT5000 tracking modules and controlling the trolley to walk according to the set route; in the tracking mode, using the ultrasonic module to detect obstacles in front in real time, and once an obstacle is detected, it will stop running immediately until the obstacle leaves and then resume operation; in the obstacle-avoiding mode, when an obstacle is detected in front, the SG90 servo drives the ultrasonic module to turn left, and if there is no obstacle on the left, the trolley turns left; if an obstacle is detected on the left, the servo drives the ultrasonic module to turn right, and if there is no obstacle on the right, the trolley turns right; if an obstacle is also detected on the right, the trolley moves backward; real-time display of detected parameters such as distance through the OLED display; transmitting the detected data to the mobile phone through the ECB02 module, and supporting the control of the trolley’s running direction (forward, backward, left turn, right turn) and mode switching through the mobile phone.
The implementation of this system effectively improves the autonomy and intelligence level of the trolley’s operation, enhances its ability to adapt to complex environments, provides an intuitive and reliable reference scheme for the research and development of related intelligent mobile devices and teaching practice, and has high practical value and promotion significance.
Keywords: STM32F103C8T6; Intelligent trolley; Tracking and obstacle avoidance; Sensor; Bluetooth communication; Autonomous control
目录
第 1 章 绪论
1.1 研究的目的及意义
1.2 国内外发展情况
1.3 本文主要研究内容
第2章 设计思路与方案论证
2.1 主要元器件选择
2.1.1 主控芯片选择
2.1.2 循迹模块选择
2.1.3 避障及距离检测模块选择
2.1.4 舵机选择
2.1.5 显示模块选择
2.1.6 蓝牙模块选择
2.2整体设计方案
第 3 章 硬件设计
3.1 主控电路模块
3.2 循迹模块电路
3.3 超声波模块电路
3.4 舵机电路
3.5 显示模块电路
3.6 蓝牙模块电路
3.7 电机驱动模块电路
第4章 系统程序设计
4.1 编程软件介绍
4.2 系统主流程设计
4.3 直流电机速度调节子流程设计
4.4 超声波检测模块子流程设计
4.5 OLED显示子流程设计
4.6 舵机子流程设计
4.7 蓝牙模块子流程设计
第 5 章 仿真测试
5.1 整体仿真测试
5.2 循迹模块功能测试
5.3 超声波与舵机协同功能测试
5.4 避障模式功能测试
5.5 显示模块功能测试
5.6 蓝牙模块功能测试
第 6 章 实物测试
6.1 整体实物测试
6.2 循迹模块功能测试
6.3 超声波与舵机协同功能测试
6.4 避障模式功能测试
6.5 显示模块功能测试
6.6 蓝牙模块功能测试
第 7 章 总结与展望
7.1 总结
7.2 展望
致谢
参考文献
附录
附录一:原理图
附录二:PCB
附录三:主程序
购买后可查看具体内容!