
设计说明书
总字数:15000+
摘 要
为了降低人们的清洁负担和生活压力,本文采用单片机智能控制技术设计一款智能扫地机器人,本设计旨在满足实际需求,设计了一款具备多种功能的智能扫地机器人。该机器人的功能包括但不限于:路径规划,以高效清洁整个房间;障碍物规避,确保安全运行;这些功能针对现实中用户对清洁效率、安全性和便利性的需求。
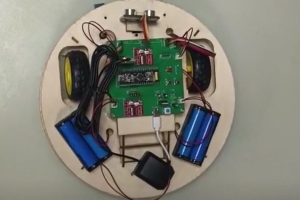
本设计采用STM32F103C8T6单片机作为扫地机器人系统主控芯片,首先进行资料的收集和查阅,进而梳理出系统的设计方案;然后对系统进行硬件电路和软件程序的设计,硬件电路包括主控芯片、定位模块、防撞模块等组成。软件模块主要进行执行流程的设计和测试;最后进行实物的焊接和调试,系统的超声波模块和舵机模块实现垃圾的清扫和防撞,实现对周围的地面环境进行检测,然后扫地机器人根据检测的信息确定其运行的轨迹,主控芯片通过输出不同的PWM脉冲控制扫地机器人工作。实物测试表明,本次设计的扫地机器人运行可以实现自动检测障碍物,自动进行避障的功能,实现系统的清洁功能。与此同时,用户可以通过手机获取扫地机器人的位置,从而方便用户寻找扫地机器人的位置。通过实物仿真,该机器人达到了以下效果:提高清洁效率,减少人工干预;避免与家具等障碍物碰撞,保护室内设施;实现自动化运行,提升用户体验。
关键词:扫地机器人;清扫;避障;GPS
Abstract
In order to reduce people’s cleaning burden and life pressure, this article adopts single-chip intelligent control technology to design an intelligent sweeping robot, effectively improving the comfort and cleanliness of the home environment.
This design uses the STM32F103C8T6 microcontroller as the main control chip of the sweeping robot system. Firstly, data is collected and consulted, and then the system design scheme is sorted out; Then design the hardware circuit and software program for the system, which includes the main control chip, positioning module, collision prevention module, etc. The software module mainly designs and tests the execution process; Finally, physical welding and debugging are carried out, and the ultrasonic module and servo module of the system are used to clean and prevent collisions, detecting the surrounding ground environment. The sweeping robot then determines its trajectory based on the detected information, and the main control chip controls the sweeping robot’s operation by outputting different PWM pulses. Physical tests have shown that the designed sweeping robot can automatically detect obstacles, avoid obstacles, and achieve the cleaning function of the system. At the same time, users can obtain the location of the sweeping robot through their mobile phones, making it easier for them to find the location of the sweeping robot.
Keywords:Sweeping robot; To sweep up; Obstacle avoidance; GPS
目 录
1 绪论
1.1 项目的背景与意义
1.2 国内外研究现状
1.3 智能扫地机器人的常用关键技术
1.4 论文组织结构
2 系统整体设计
2.1 设计目标
2.2 整体方案设计
2.3 各模块方案选择
3 系统硬件设计与实现
3.1 硬件系统整体设计及说明
3.2 主控模块电路
3.3 避障模块电路
3.4 舵机模块电路
3.5 GPS监测模块电路
4 系统程序设计
4.1 编程软件介绍
4.2 系统主流程设计
4.3 独立按键
4.4 直流电机-MX1508驱动模块子流程
4.5 超声波检测模块子流程
4.6 蓝牙模块子流程
5 实物测试
5.1 实物制作和焊接
5.2 测试用例设计
5.3 系统异常测试
5.4 系统整体功能测试
5.5 系统模块功能测试
5.6 测试结论
6 总结
参考文献
致 谢
附 录1 原理图
附 录2 软件源码